

Конференция Пятницкого

3-5 июня 2020 г. состоялась XV Международная конференция «Устойчивость и колебания нелинейных систем управления» STAB-20 (конференция Пятницкого).
Конференция организована ИПУ РАН при поддержке ОЭММПУ РАН и информационной поддержке IEEE Russia Section. Председатель Оргкомитета – г.н.с. лаборатории динамики нелинейных процессов управления им. Е.С. Пятницкого д.ф.-м.н., профессор В.Н. Тхай.

В связи с пандемией новой коронавирусной инфекции и действующими из-за этого мерами повышенной готовности организаторы не имели возможности провести конференцию в ее традиционной форме, собрав в Институте проблем управления РАН коллег из разных стран. Но, проводимая в онлайн-режиме, STAB-20 сумела выполнить все поставленные перед ей задачи. Виртуальные заседания конференции посетили около 150 участников – докладчиков и слушателей. Присутствовали представители Армении, Италии, Казахстана, Норвегии, Российской Федерации, Узбекистана. Среди российских городов наибольшее представительство было у Москвы, Санкт-Петербурга, Екатеринбурга, Нижнего Новгорода (всего 24 города).

Научная тематика конференции включила в себя такие направления, как:
1.Общие вопросы теории устойчивости и стабилизации движения;
2.Общие вопросы и методы теории нелинейных колебаний;
3.Методы функций Ляпунова;
4.Гладкая и негладкая динамика;
5.Вопросы управляемости и наблюдаемости;
6.Проблемы робастного управления;
7.Управление в механических и электромеханических системах;
8.Управление роботами и мехатронными системами;
9.Колебания, устойчивость и стабилизация в сетевых и взаимосвязанных системах;
10.Устойчивость и управление гибридными системами и системами с переключениями.

В первые два дня конференции в ходе двух пленарных заседаний были представлены 4 пленарных доклада:
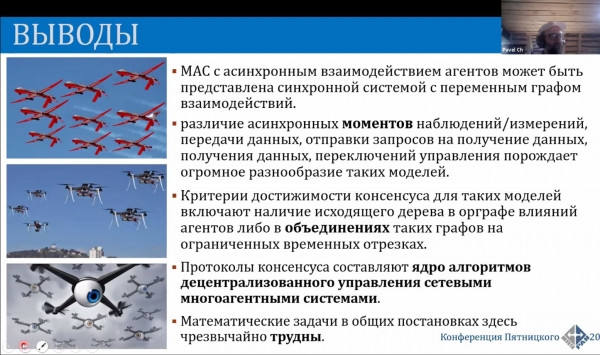
1.В.С. Козякин (ИППИ РАН, Москва), Н.А. Кузнецов (ИРЭ РАН, Москва и МФТИ, Долгопрудный), П.Ю. Чеботарев (ИПУ РАН, Москва). О некоторых подходах к проблеме консенсуса в асинхронных мультиагентных системах. Делал доклад П.Ю. Чеботарев;
2.L. Zaccarian (LAAS-CNRS, Toulouse and University of Trento). To Stick or to Slip: Lyapunov-based Reset PID for Positioning Systems with Coulomb and Stribeck Friction;
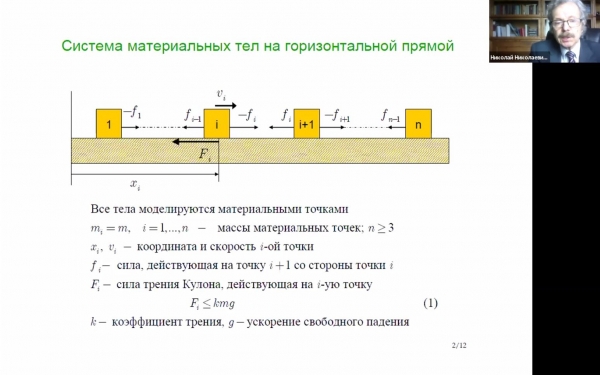
3.Н.Н. Болотник, Т.Ю. Фигурина (ИПМех, Москва). Оптимальное управление локомоционными системами, перемещающимися без специальных движителей по плоскости с сухим трением. Делал доклад Н.Н. Болотник;
4.Ширяев (Norwegian University of Science and Technology, Trondheim). О роли трансверсальной динамики и ее линеаризации в задаче управления движением механической системы.
На 12 секционных заседаниях были сделаны 139 секционных докладов.
В заключение состоялась общая дискуссия, на которой участники подвели научные итоги заседаний, оценили новый необычный формат проведения конференции и обобщили предложения по дальнейшим направлениям развития конференции.
Опубликован сборник материалов конференции на русском языке (в электронном виде) https://stab20.ipu.ru/ru/prcdngs
Оргкомитет ведет подготовку и формирование сборника трудов конференции на английском языке для представления в электронную библиотеку IEEEXplore.
Сайт конференции: https://stab20.ipu.ru/ru